
 Check the
documentation
Check the
documentation Ask the
Community
Ask the
Community Take a look
at
Academy
Take a look
at
Academy Cognite
Status
Page
Cognite
Status
Page Contact
Cognite Support
Contact
Cognite Support


Hi all,
We are excited to bring you updates on the next release of Cognite InRobot, available on June 4th 🚀
With Cognite InRobot we are continuously releasing smaller enhancements based on your feedback, but for our June 4th release we’ve also done a full redesign for creating autonomous missions, providing you an easier way to create missions and allowing for robotic missions to be created without a live connection (offline) to the robot.
Create autonomous missions
With our improved mission creation flow we focused on providing you a more tailored experience of how to get started with creating missions, and building out the tasks that the robot is to perform in the field. By attaching a task to an Asset and Waypoint, the actions that the robot executes in the field is instantly linked to any other data that is available on the Asset and the spatial position of the robot. This means that live data captured by the robot in the field, such as images/video and measurements, will further enrich the data universe available in Cognite Data Fusion for all users.

Offline mission creation
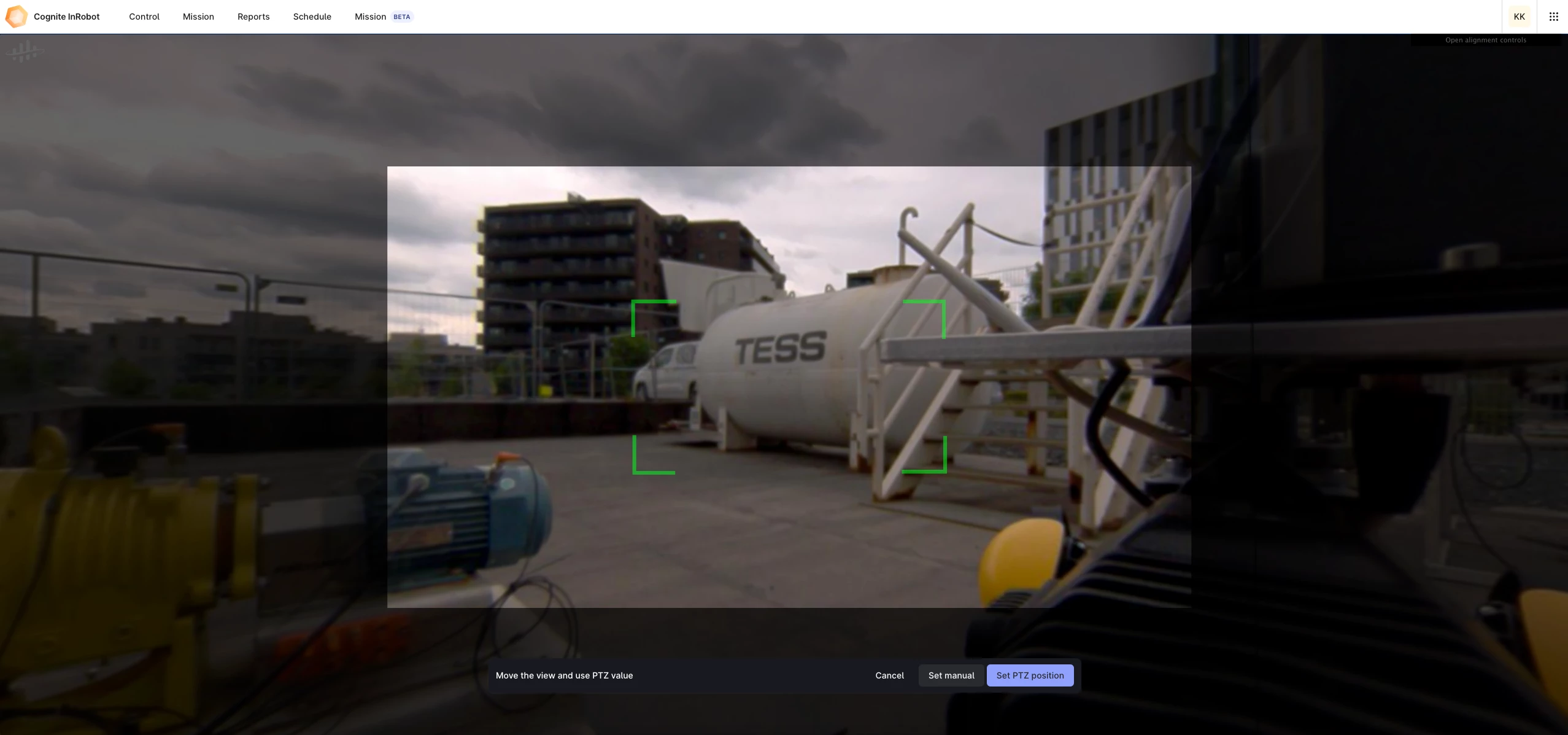
To create autonomous missions we need a way to define what the robot is going to inspect at every step throughout the mission. Independent of what action it is to perform, a key step here is to define where the robot is looking, essentially controlling its camera position. Without this we cannot ensure that the actions are being executed in the correct way.
Before we were dependent on the robot being out in the field to set these camera positions at every step of the mission that was being created. Today, we are excited that this can now be done without having the robot in the field. By using contextualised 360 images connected to a 3D map of the execution site we can now set the camera positions at each waypoint before sending the robot out in the field, reducing the time and cost of creating autonomous missions.
We hope this release finds you well and we are looking forward to your feedback 😃