Check the
documentation
Check the
documentation Ask the
Community
Ask the
Community Take a look
at
Academy
Take a look
at
Academy Cognite
Status
Page
Cognite
Status
Page Contact
Cognite Support
Contact
Cognite Support

We trying to use spot in inRobot application in our factory field.
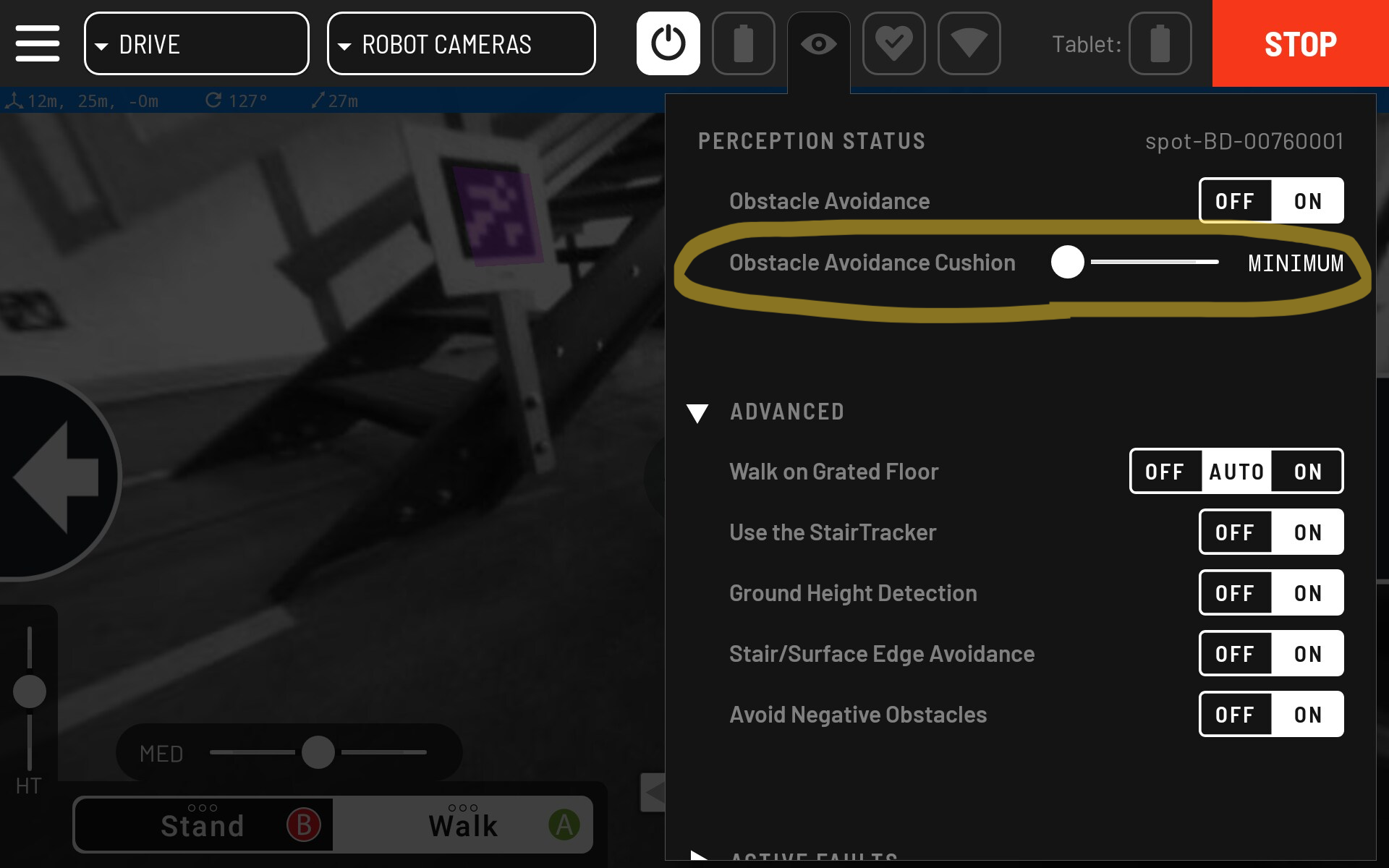
When we move Spot with Inrobot, the obstacle avoidance Cushion distance is fixed at a minimum, and it sometimes approach people or objects extremely near. It’s very dangerous ...
So we would like InRobot to implement a function to control Spot's Obstacle Avoidance Cushion Distance contoroll function.
↓ Obstacle Avoidance Cushion Distance contoroll (Spot’s official contoroll tablet)