
 Check the
documentation
Check the
documentation Ask the
Community
Ask the
Community Take a look
at
Academy
Take a look
at
Academy Cognite
Status
Page
Cognite
Status
Page Contact
Cognite Support
Contact
Cognite Support



Cognite Reveal
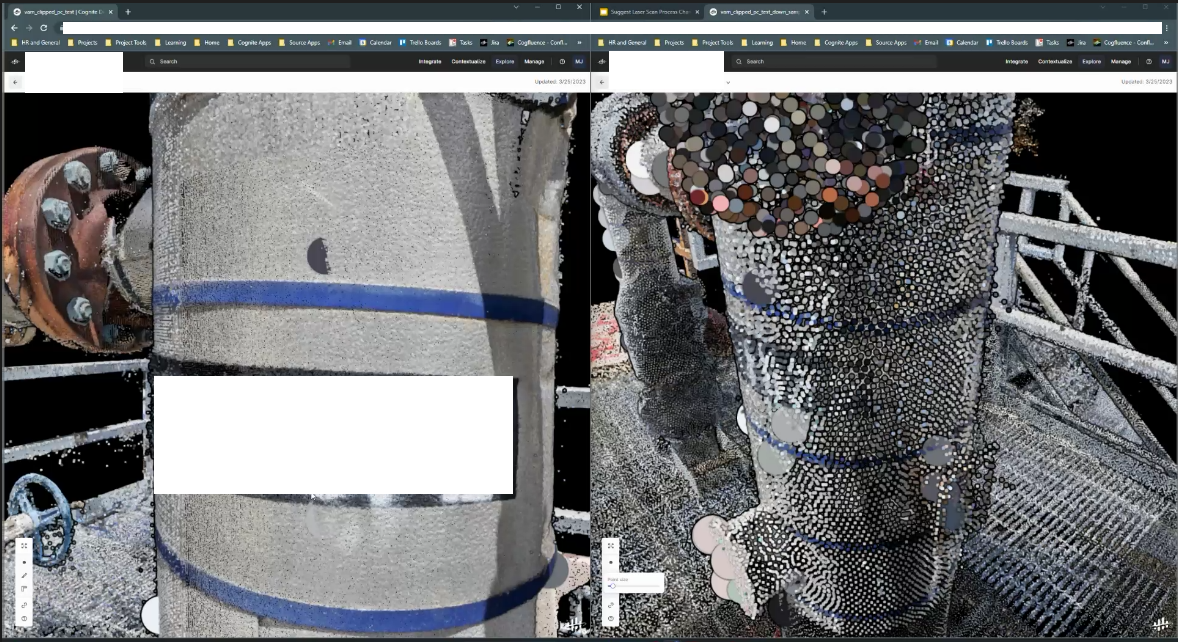
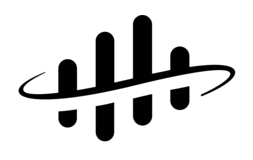
We are being told that our models need to be downsampled which is resulting in better performance in CDF but poor quality on the viewer. We have consistently noticed that we are unable to have one large point cloud together in the viewer and also the viewing quality is very poor compared to what laser scanning vendor solutions show. I need some attention on this from Product?
Why should we downsample and decrease the density of the Point Cloud? does not appear to be the right thing to do
Why should we chop up the 3D model in pieces?